十大正规外围买球平台机器人与智能技术研究团队题为“Positive and Negative Obstacles Detection based on Dual-LiDAR in Field Environments”的学术研究论文被机器人领域顶级刊物《IEEE Robotics and Automation Letters》(JCR 1区,中国科学院2区TOP,影响因子5.2,)录用。该研究成果以上海电机学院为第一单位,阿里巴巴集团(上海)为第二单位,作者为刘子俊(在读研究生)、范光宇老师、饶蕾老师(通讯)、程松林老师、陈年生老师、宋晓勇老师和杨定裕老师。
随着自动驾驶技术的飞速发展,环境感知作为自主式驾驶地面车辆(Autonomous Land Vehicle,ALV)获取周围环境信息的关键,决定了自动驾驶的智能化水平。在环境感知中,ALV将地面以上的物体视为阻碍其安全行驶的正障碍物,而低于地面的物体视为容易导致其侧翻的负障碍物。为提高ALV在各种环境下的运动表现,团队提出了一种基于双激光雷达的正负障碍物检测方法。
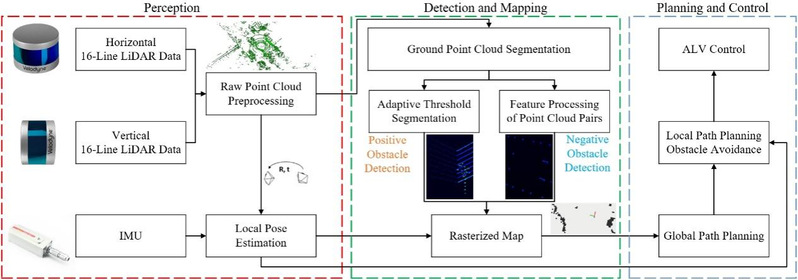
通过基于改进射线法的自适应阈值地面点云分割方法实现对地面点云分割和正障碍物检测的准确性和鲁棒性。利用点云局部分析和特征点对聚类实现ALV对负障碍物的准确检测,进而实现ALV对负障碍物的局部避障策略。所提方法在多种现场复杂环境下,对正障碍物的检测成功率达到98.5%,对负障碍物的检测成功率达到98.7%。研究成果可有效提升ALV在自主导航中的实际应用潜力,为自动驾驶领域的技术发展提供重要支持。
机器人与智能技术研究团队由1名教授、2名副教授、1名高级实验师、13名在读研究生以及9名合作企业导师组成。团队的研究方向主要涵盖智能感知与控制技术、移动机器人导航技术、无线网络优化和机器学习以及特定场景下的语音识别技术。团队承担着国家自然科学基金项目、上海市闵行区科委产学研项目、上海高校选拔培养优秀青年教师科研专项基金项目以及20多项企业委托科研项目。在《IEEE Robotics and Automation Letters》《IEEE Transactions on Vehicular Technology》《IEEE Access》《机器人》等国内外学术期刊和会议上发表30多篇论文,并获得多项国家授权发明专利。(文字:十大正规外围买球平台 刘子俊 饶蕾)
团队网站:https://team.sdju.edu.cn/